|
程式檔 led.c 使用驅動程式 leds,操控開發板的 LED。 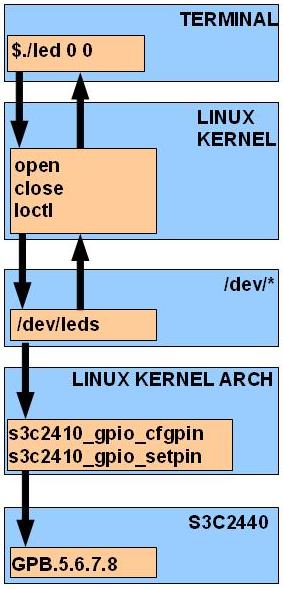
|
|
LED 應用程式是由 SHELL 呼叫,以一個行程的形式執行。
|
|
LED 裝置驅動程式 mini2440_leds.c 是直接編入核心,不是以外部驅動程式的方式掛載。 編譯核心時,會直接產生 mini2440_leds.o,納入核心驅動程式映像,而不是產生 mini2440_leds.ko,從外面掛載。
引入標頭檔群。
定義裝置名稱字串 leds,這個名稱字串會加入到 misc 結構的 name 變數中,成為驅動程式的名稱。這個名稱在核心驅動程式中必須是唯一。
定義腳位表,陣列中每個成員都描述一根腳位的位置,分別指向 s3c2410 的 GPB 的第 5、6、7、8 腳位。
定義腳位組態表,陣列中每個成員都描述一根腳位的組態,均為輸出組態。
定義裝置 IO 控制函式,此函式會設定到裝置驅動程式的操作函式結構 dev_fops 的 .ioctl 變數,成為驅動程式的 ioctl 操作函式。
參數 cmd 是命令參數,0 表示 LED 亮,1 表示 LED 暗。
定義裝置(檔案)操作結構,包含裝置擁有者和裝置控制函式。
定義裝置結構,包含次要編號、裝置名稱、裝置操作結構。
關於一般裝置結構 miscdevice。
模組初始化函式。
模組卸載函式。
設定模組初始化函式。
|
|
|
|
一般裝置註冊函式 misc_register。
|
|
一般裝置註銷函式 misc_deregister。
|
|
關於 module_init。 mini2440_leds.o PART I 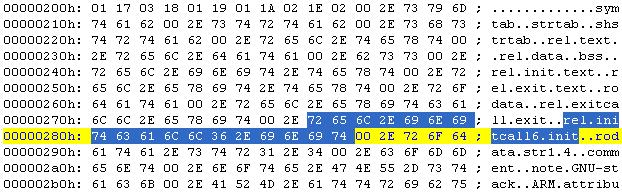
mini2440_leds.o PART II 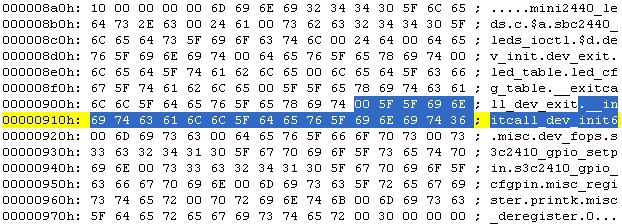
module_init 定義在 /include/linux/init.h。
__initcall 的定義是 device_initcall。
device_initcall 的定義是 __define_initcall。
__define_initcall 的定義。
module_init(x) 的展開如下。
module_init(dev_init) 的展開如下。而 dev_init 應該是符號 __initcall_dev_init6 的位址值。
|
|
關於 module_exit。
module_exit 定義在 /include/linux/init.h。
__exitcall 的定義。
其中,__exit_call 的定義,指定區段名稱是 .exitcall.exit。
最後,module_exit(dev_exit) 的展開。
mini2440_leds.o PART III 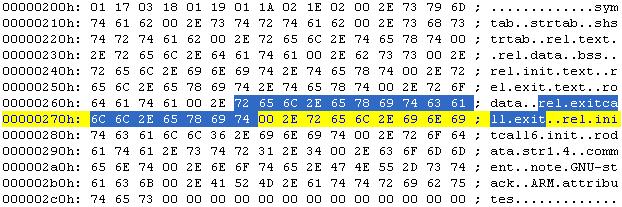
mini2440_leds.o PART IV 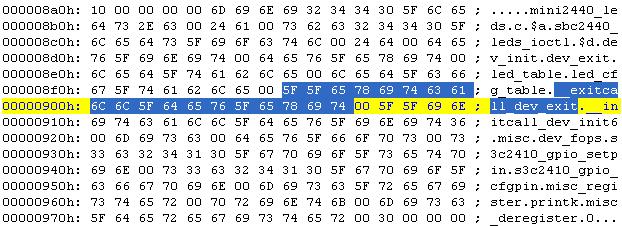
|
|
|
|
檔案操作函式結構是定義在 /include/linux/fs.h,定義檔案操作所需要的函式。 有的函式是用於操作檔案,有的函式是用於操作設備驅動程式。 設備驅動程式可以視需要,選擇性的實作操作函式。
|