使用者程式要顯示字串訊息,就要呼叫系統函式 printf。 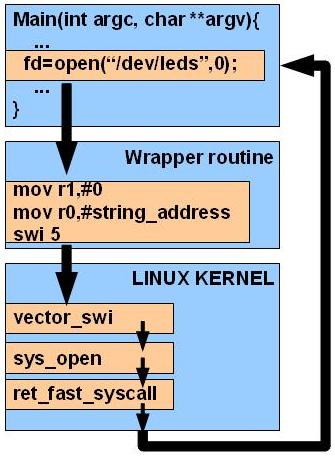
中斷向量表,當各種中斷發生時,程式計數器會自動跳躍到中斷表內,再跳躍到中斷處理程序開頭,準備執行中斷處理函式。 ARM 中斷向量表。
.LCvswi 存放軟體中斷處理程序入口點位址 vector_swi。
軟體中斷處理程序。
系統呼叫向量表 sys_call_table。
向量表內容 calls.S。
這裡以系統呼叫 sys_open 為例,說明系統呼叫建立過程。
sys_open 的函式實作。
當 sys_open 執行完畢,回返時,程式就會回返到先前在 vector_swi 設置的 ret_fast_syscall。 ret_fast_syscall 可以立即回到原本的使用者程序,或者切換到其它程序,端看行程的參數設定值。 就算切換到其它程序,還是會再切換回來,只是需要花一些時間慢了一點。這就是 ARM LINUX 系統呼叫的整個執行過程。
|
系統呼叫函式 sys_open 是開啟設備驅動程式的函式。函式位於 fs/open.c。
裝置檔案開啟步驟。
1.呼叫 getname,取得檔案名稱字串,存入一個核心記憶體分頁,例如 "/dev/leds"。
函式 getname 是用於在核心記憶體分頁空間中取得一個用來存放名稱字串的分頁。
函式 do_getname 是用於將名稱字串複製到核心記憶體分頁。
關於 get_unused_fd_flags。
get_unused_fd_flags 是函式 alloc_fd 的再定義。
函式 alloc_fd 的功能是從核心記憶體取的一個檔案開啟表結構(files_struct)的記憶體。
檔案開啟表結構。
比較重要的是
檔案結構。
|
SYSCALL_DEFINE1(close, unsigned int, fd) 會轉譯成
系統呼叫函式 sys_close 是關閉設備驅動程式的函式。函式的實作位於 fs/open.c。
|
系統呼叫函式 sys_ioctl 是關閉設備驅動程式的函式。函式的實作位於 fs/open.c。
SYSCALL_DEFINE3(ioctl, unsigned int, fd, unsigned int, cmd, unsigned long, arg) 會轉譯成
九個系統定義的常數都是數字很大的常數,包括
1.取得 inode,。
vfs_ioctl 是 ioctl 的執行函式,分有鎖核心和沒有鎖核心兩種處理方式。其中,以沒有鎖住核心為優先。
1.當檔案操作函式為空指標,函式回返。
,。
,。
,。
|