|
使用 C 語言和組合語言說明 HT66F60 的編碼技巧,包括主程式流程、應用程式與各個特殊功能區塊的驅動程式。 |
|
HOLTEK 免費提供程式編輯器 HT-IDE3000,可以編輯並編譯 C 語言和組合語言。 筆者覺得 HT-IDE3000 非常不穩,容易當掉,所以只用來編譯程式碼。 編輯程式碼可以用 ECLIPSE FOR C++,或使用一般的文字編輯器,即可。 HT-IDE3000 下載網址 http://www.holtek.com.tw/chinese/tech/tool/Mainpage1.htm 
下載後,直接安裝,即可。之後,建立各程式碼檔案,編譯程式。 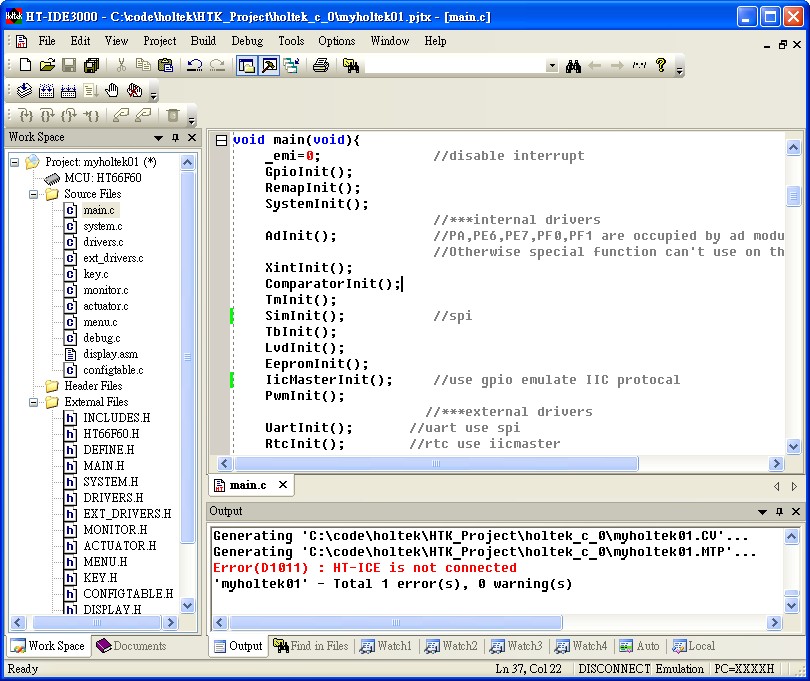
筆者將程式碼分成 11 個程式碼檔案,包括 11 個 C 語言檔和 1 個組合語言檔。
|
|
主程式負責整支程式的主要流程,包括驅動程式與應用程式的初始化與執行流程。
|
|
系統服務程式的功能是執行系統啟動步驟,檢查系統參數與資料,啟動應用程式。之後,監視系統狀態,執行系統事件的處理,例如系統休眠。目前是空函式。 |
|
內部驅動程式,包括 GPIO、AD、INT、COMPARATOR、TM、SIM、TB、LVD、EEPROM、IIC MASTER、PWM。其中,IIC 和 PWM 是用 GPIO 模擬的內部驅動程式。 HT66F60 沒有提供 IIC MASTER 的硬體,必須使用 GPIO 模擬。 HT66F60 有提供 PWM,但硬體 PWM 的解析度太高(20MS),無法用於加熱器,所以使用計時器配合 GPIO 製作一個低度率的 PWM。
|
|
外部驅動程式,包括 HT45B0F、HT1382。 HT45B0F 是一個透過 SPI 介面操作的串列埠控制器。 HT66F60 是一個透過 IIC MASTER 操作的萬年曆控制器。
|
|
KEY.C 是按鍵服務程式,用來讀取使用者的按鍵輸入。
|
|
MENU.C 是目錄服務程式,配合按鍵輸入,讓使用者操作目錄系統。 |
|
MONITOR.C 是環境監督服務程式,讀取佈置在環境中的感測器,包括溫溼度感測器。 |
|
ACTUATOR.C 是致動器服務程式,用來啟動壓縮機和加熱器等設備。其中,加熱器必須配合 PWM,控制加熱速度。 |
|
DISPLAY.ASM 是面板資訊顯示程式,用來目錄資訊或系統資訊顯示於面板。 |
|
DEBUG.C 是偵錯程式,用來接受偵錯指令,並執行偵錯指令。
|